COSMIC SECRETS
The Enigmas on Mars 55
|
Spirit
Rover Tracks on
Mars
..
Credit:
NASA Click image
for full size
New imaging techniques
enabled Mars Global Surveyor
to capture the incredibly detailed
images from orbit of the Spirit Mars
Exploration Rover's tracks on the
surface of Mars.
The orbiter entered
its third mission extension in
September 2004 after seven years of
orbiting Mars. The spacecraft entered
Mars orbit on Sept. 12, 1997.
Image Credit: NASA .
SOURCE: NASA
solarsystem.nasa.gov/
..
Credit NASA
|
Spirit
Views of
Spirit's Rover Tracks
MGS MOC Release
No. MOC2-862,
27 September 2004
..
Credit:
NASA/JPL/Malin
Space
Science Systems
..
Credit:
NASA/JPL/Malin
Space
Science Systems
..
Credit:
NASA/JPL/Malin
Space
Science Systems
Malin
Space
Systems - LARGE VIEW 50cm/pixel
SOURCE: Malin
Space
Science Systems
|
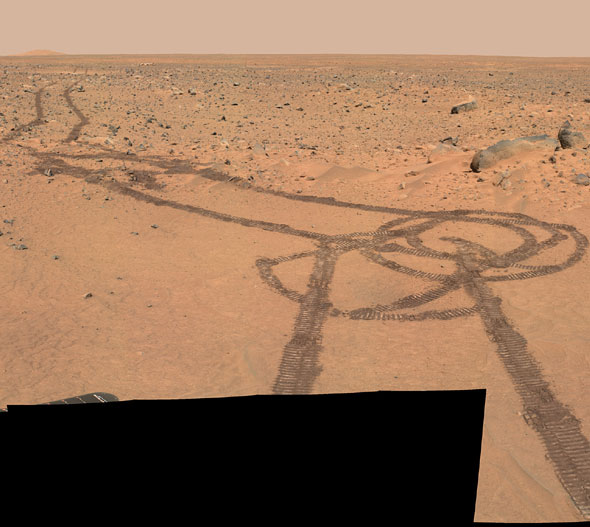
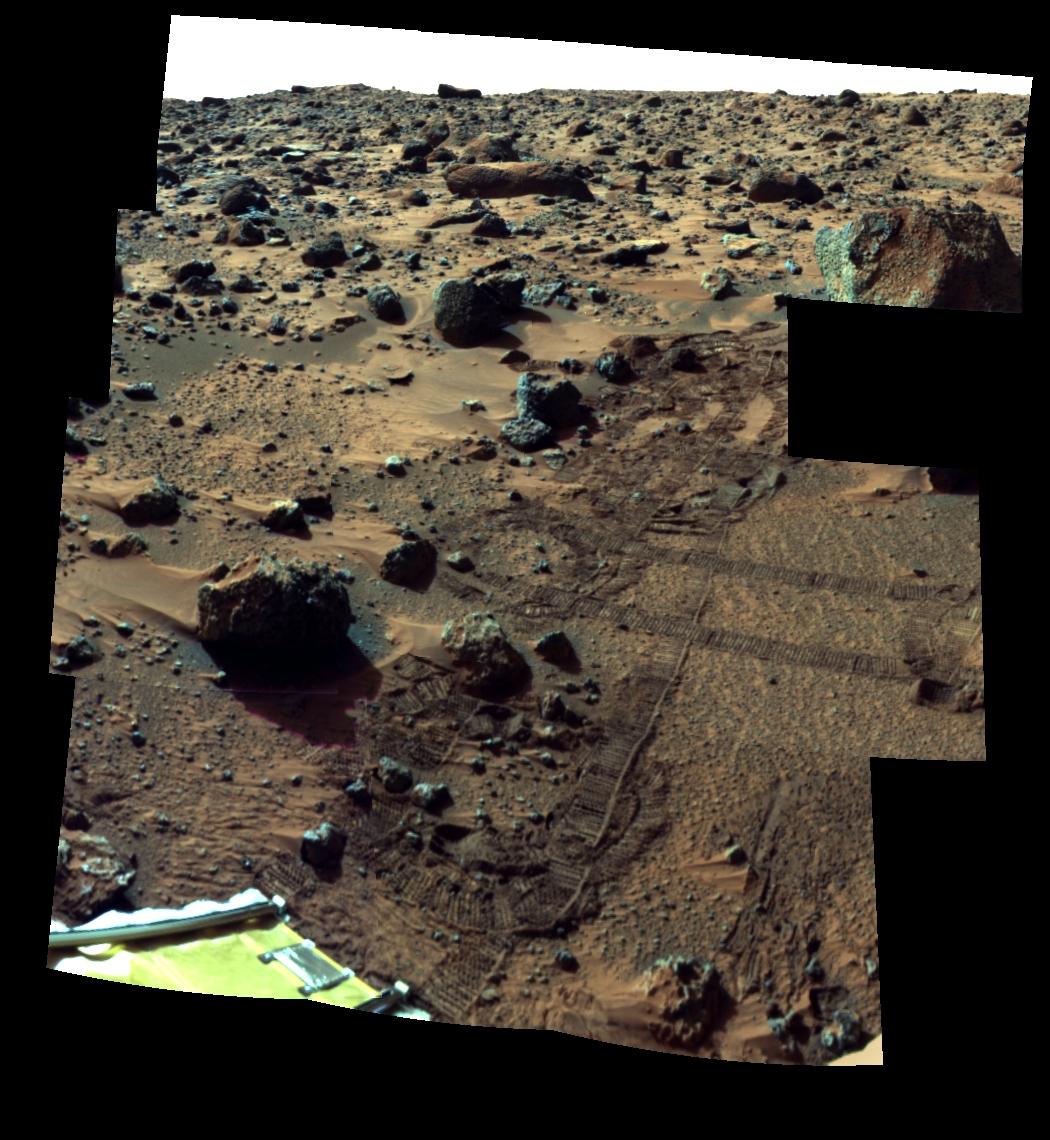
Spirit
Rover Tracks on
Mars
Mosaic of MER-A
Navcam images
on Sol 62
....
Image
Courtesy NASA/JPL
Click image for full size
..
MOC2-862g: Full
R15-02643 cPROTO
image, MER-A Site
..
Credit:
NASA/JPL/Malin
Space
Science Systems
Over the past year and a half, the
Mars Global Surveyor
(MGS) and Mars Orbiter Camera (MOC) operations teams
have been developing
and testing a technique through which the MOC can
acquire images that have
a higher resolution than the camera was originally
designed to achieve.
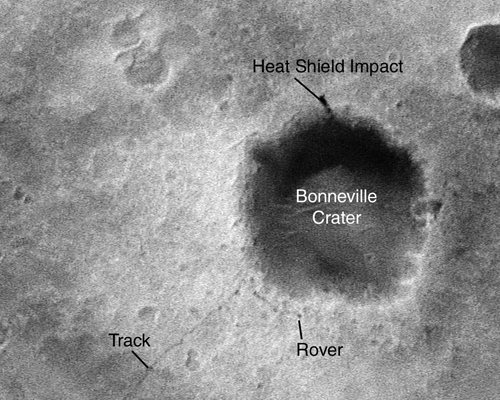
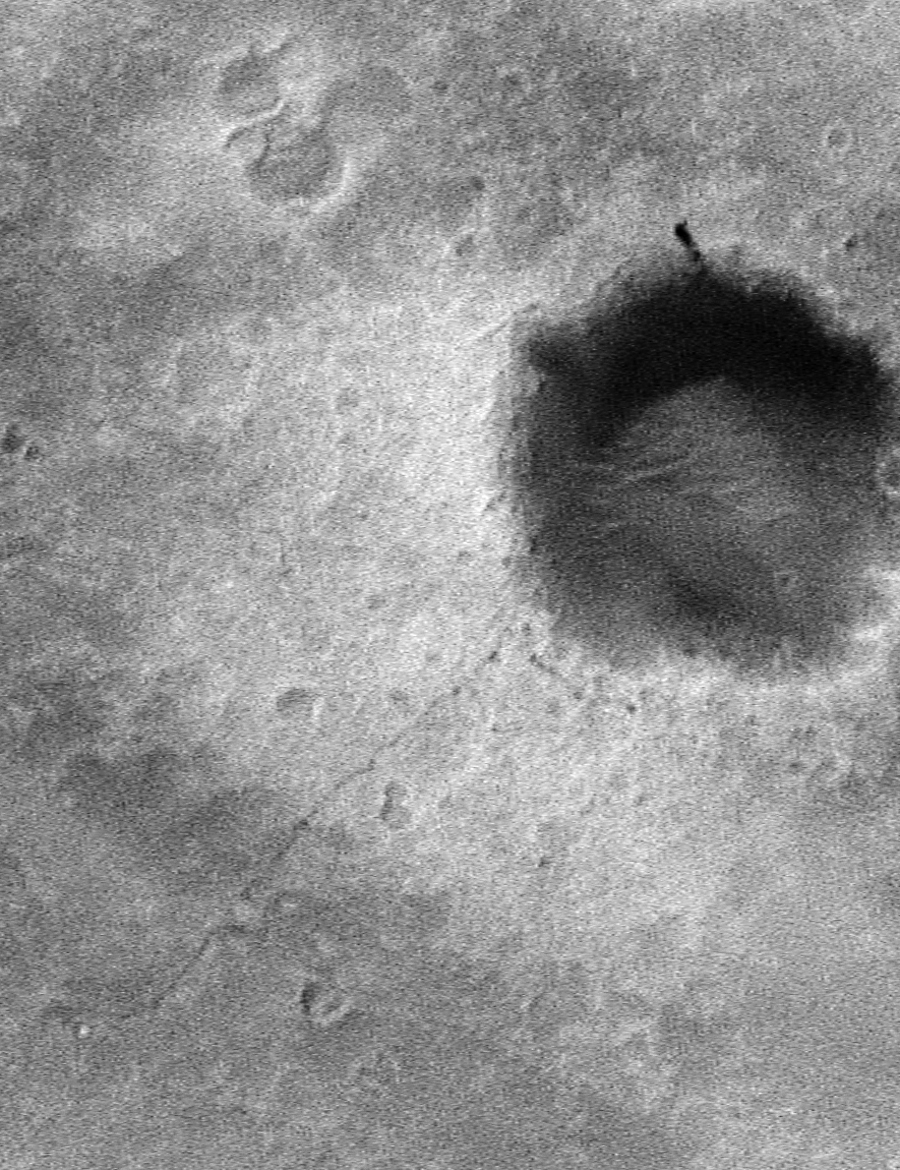
The technique is tricky and the spacecraft does not
always hit its target.
However, when it does, the results can be
spectacular. Two examples are
shown here. The first (MOC2-862a), providing key
evidence for the action
of liquid water on Mars, is a view of megaripples
formed in an ancient
catastrophic flood in Athabasca Vallis. The second
(MOC2-862b) shows the
Mars Exploration Rover (MER-A), Spirit, and the
tracks it made during the
first 85 sols of work in Gusev Crater.
Under normal operating conditions,
the highest resolution
images the MOC narrow angle camera can obtain are
about 1.4 to 1.5 meters
per pixel (4.6-5.0 feet/pixel). An image of 1.4
m/pixel permits objects
approximately 4 to 5 meters across (13-16 ft) to be
clearly resolved. The
new technique developed by the MOC and MGS
operations teams, known as cPROTO
for "compensated Pitch and Roll Targeted
Observation," allows the camera
to obtain images that have better than 1 meter per
pixel resolution. Typically,
the images will have about 1.5 meters per pixel
resolution in the cross-track
(east-west) direction, and about 50 centimeters
(half a meter) per pixel
in the downtrack (north-south) direction. These
pictures also have an improved
signal-to-noise ratio when compared to "normal" 1.5
m/pixel images, thus
improving on the overall quality of a typical MOC
full-resolution image.
MOC cPROTO images allow objects of as small as 1.5
meters (5 feet) to be
seen, including the Mars Exploration Rovers and the
tracks they make on
the surface.
The MOC narrow angle camera consists
of a single line
of 2048 detectors (which translates to 2048 pixels
in a full-resolution,
full-width image). The motion of the MGS spacecraft
as it orbits Mars allows
this single line of detectors to be swept over the
planet's surface, building
up an image one line at a time (i.e., much as a
flatbed scanner attached
to a computer builds up a picture). Because the MGS
orbit is nearly circular,
each of the 2048 pixels in a full resolution image
correspond to a square
~1.5 by ~1.5 meters on a side, thus giving the
typical "1.5 meters per
pixel" or "1.5 m/pixel" resolution often cited for
MOC's most detailed
images.
Available
Image Sizes:
SOURCE: Malin
Space
Science Systems |
Opportunity
Rover Tracks on
Mars
..
Credit
NASA Click image
for full size
..
Credit
NASA
New imaging techniques
enabled Mars Global Surveyor
to capture the incredibly detailed
images from orbit of the Spirit Mars
Exploration Rover's tracks on the
surface of Mars.
The orbiter entered
its third mission extension in
September 2004 after seven years of
orbiting Mars. The spacecraft entered
Mars orbit on Sept. 12, 1997.
Image Credit: NASA .
SOURCE: NASA
solarsystem.nasa.gov/
|
Opportunity
Rover Tracks on
Mars
HiRISE PIA08816
Opportunity at
Victoria Crater
from Mars Reconnaissance Orbiter
..
Credit:
NASA/JPL/University
of Arizona Click image for full size
Description:
Mars Rover
"Opportunity" at Victoria
crater, as viewed from orbit on October 3, 2006.
Note the shadow of the
rover's camera mast.
Original JPL
site caption: "This
image from the High Resolution Imaging Science
Experiment on NASA's Mars
Reconnaissance Orbiter shows the Mars Exploration
Rover Opportunity near
the rim of "Victoria Crater." Victoria is an
impact crater about 800 meters
(half a mile) in diameter at Meridiani Planum near
the equator of Mars.
Opportunity has been operating on Mars since
January, 2004. Five days before
this image was taken, Opportunity arrived at the
rim of Victoria, after
a drive of more than 9 kilometers (over 5 miles).
It then drove to the
position where it is seen in this image.
Shown in the
image are "Duck
Bay," the eroded segment of the crater rim where
Opportunity first arrived
at the crater; "Cabo Frio," a sharp promontory to
the south of Duck Bay;
and "Cape Verde," another promontory to the north.
When viewed at the highest
resolution, this image shows the rover itself,
wheel tracks in the soil
behind it, and the rover's shadow, including the
shadow of the camera mast.
After this image was taken, Opportunity moved to
the very tip of Cape Verde
to perform more imaging of the interior of the
crater.
This view is a
portion of an
image taken by the High Resolution Imaging Science
Experiment (HiRISE)
camera onboard the Mars Reconnaissance Orbiter
spacecraft on Oct. 3, 2006.
The complete image is centered at minus7.8 degrees
latitude, 279.5 degrees
East longitude. The range to the target site was
297 kilometers (185.6
miles). At this distance the image scale is 29.7
centimeters (12 inches)
per pixel (with 1 x 1 binning) so objects about 89
centimeters (35 inches)
across are resolved. North is up. The image was
taken at a local Mars time
of 3:30 PM and the scene is illuminated from the
west with a solar incidence
angle of 59.7 degrees, thus the sun was about 30.3
degrees above the horizon."
Date: 3
October 2006(2006-10-03)
Author:
NASA/JPL/University of
Arizona
Source: NASA
Photo
Journal
|
Victoria Crater
at Meridiani
Planum
HiRise PIA08813
..
Credit:
NASA/JPL-Caltech/University
of Arizona/Cornell/Ohio State University
Full
Size -- Full
Size
Annotated
"Victoria
Crater," about 800
meters (one-half mile) in diameter, has been home
ground for NASA's Mars
Exploration Rover Opportunity for more 14 of the
rover's first 46 months
on Mars. This view shows the rover's path overlaid
on an image of the crater
taken by the High Resolution Imaging Science
Experiment on NASA's Mars
Reconnaissance Orbiter.
Opportunity
first reached the
crater's rim on Sept. 27, 2006, during the 951st
Martian day, or sol, of
the rover's work in the Meridian Planum region of
Mars. The rover then
explored clockwise about one-fourth of the way
around the rim before returning
to a point close to its first overlook. On the
mission's 1,293rd sol (Sept.
13, 2007), Opportunity began a sustained
exploration of the interior of
the crater, entering at an alcove called "Duck
Bay" on the western side
of Victoria.
This traverse
map includes Opportunity's
route though Sol 1,365 (Nov. 26, 2007). The scale
bar is 300 meters (984
feet) long.
Image Credit:
NASA/JPL-Caltech/University
of Arizona/Cornell/Ohio State University
Image Addition
Date: 2006-10-06
Source: NASA
Photo
Journal
|
Rover Tracks on
Mars
..
Credit:
Flight
Projects
- Mars Exploration Rover - Robotics NASA
|
Rover Tracks on
Mars
Mars Pathfinder
Rover: Sojourner
..
Credit:
Mars
Pathfinder
Rover: Sojourner - Robotics NASA
...
Mars Pathfinder
Super Pan
October 10,
1997
..
Credit:
USGS IMP Team,
JPL, NASA - Click image for full size
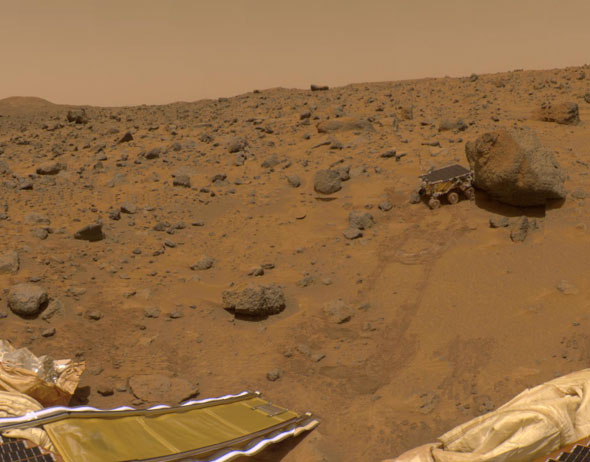
Mars
Pathfinder Super Pan
Explanation:
Spectacular details
of rover tracks, wind-driven soil, and textured
rocks on the Martian surface
fill this color mosaic. The view is
north-northeast from the Sagan Memorial
Station at the Pathfinder landing site on Mars.
These images are just part
of the "Super Panorama" - a detailed color and
stereo imaging data set
being compiled by Pathfinder's IMP camera. The
data set will be used to
derive detailed topographic maps of the landing
site and to further explore
the mineralogy of the martian rocks and soil. The
forward rover deployment
ramp and the rock named Barnacle Bill, appear in
the foreground at the
left while the larger Yogi rock is partly visible
at the upper right. Criss-crossing
tracks were made by the cruising Sojourner robot
rover's spiked wheels.
With three wheels on each side, the two foot long
rover makes tracks about
1.5 feet apart.
SOURCE:
NASA
APOD October 10, 1997
|
| Related Links:
|
| FAIR USE
NOTICE: This page contains copyrighted
material the use of which has not been specifically
authorized by the copyright
owner. Pegasus Research Consortium distributes this
material without profit
to those who have expressed a prior interest in
receiving the included
information for research and educational purposes. We
believe this constitutes
a fair use of any such copyrighted material as
provided for in 17 U.S.C
§ 107. If you wish to use copyrighted material from
this site for
purposes of your own that go beyond fair use, you must
obtain permission
from the copyright owner. |
|
~ MENU
~
|










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}